

仿射函数,线性函数以及泰勒公式还有泰勒估算...
1. 先说仿射函数和线性函数
线性函数平常非常常见:

这里我们是将一个4维的向量最后投射到一个1维的值。不过这里注意,这个函数是经过原点的。
再看下仿射方程。

这里我们可以看下他们的区别
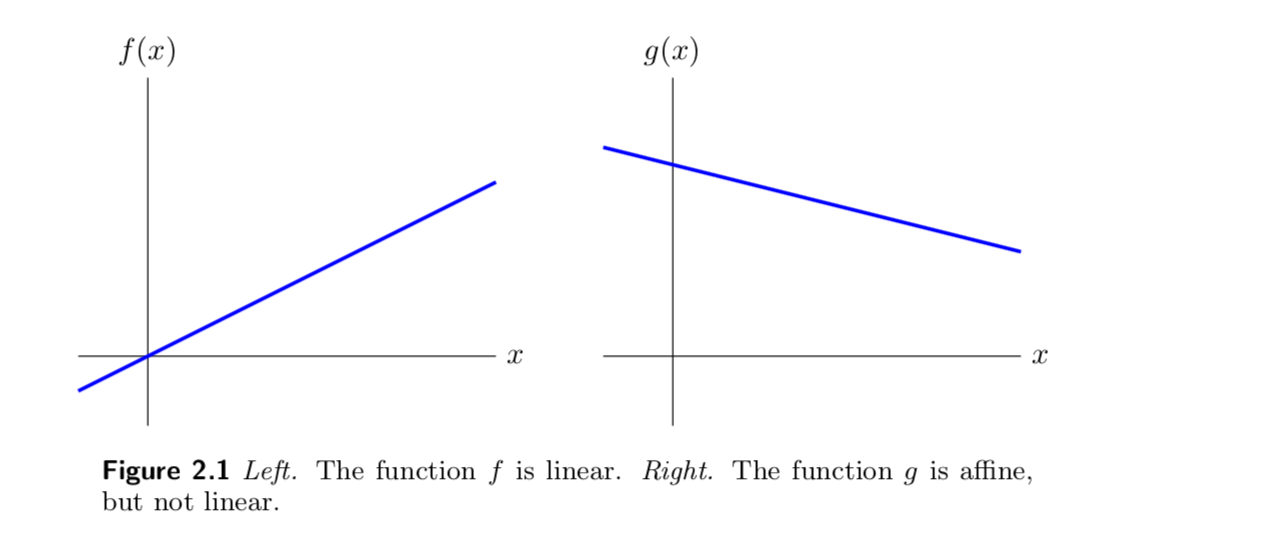
直观的区别就是会不会经过原点。
知乎上有大佬是这么解释“
仿射函数即由由1阶多项式构成的函数,一般形式为 f (x) = A x + b,这里,A 是一个 m×k 矩阵,x 是一个 k 向量,b是一个m向量,实际上反映了一种从 k 维到 m 维的空间映射关系。
设f是一个矢性(值)函数,若它可以表示为f(x1,x2,…,xn)=A1x1+A2x2+…+Anxn+b,其中Ai可以是标量,也可以是矩阵,则称f是仿射函数。
其中的特例是,标性(值)函数f(x)=ax+b,其中a、x、b都是标量。此时严格讲,只有b=0时,仿射函数才可以叫“线性函数”(“正比例”关系)。”
其中的特例是,标性(值)函数f(x)=ax+b,其中a、x、b都是标量。此时严格讲,只有b=0时,仿射函数才可以叫“线性函数”(“正比例”关系)。”
接着他们会有一些性质,我贴一下:

那我们也经常用这种办法来判断一个方程是不是仿射函数。
2. 泰勒估算
那先简单说下泰勒公式吧。
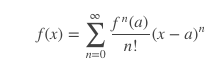
这个样子,就是说,我们可以把一个方程,写成多项式的形式。这个有其中一个好处,就是,我们去做一些估算。比如一个函数的值不能直接求到,我们能不能用这个方式来计算?
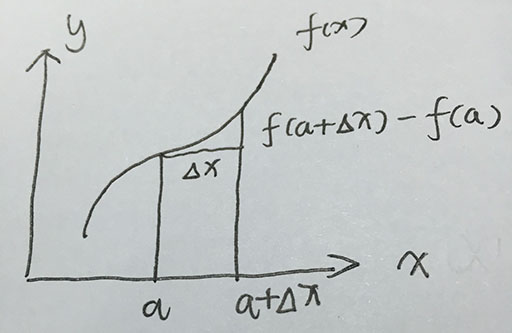
从函数的线性近似f(a+Δx)=f(a)+f′(a)Δxf(a+Δx)=f(a)+f′(a)Δx来估计函数值。
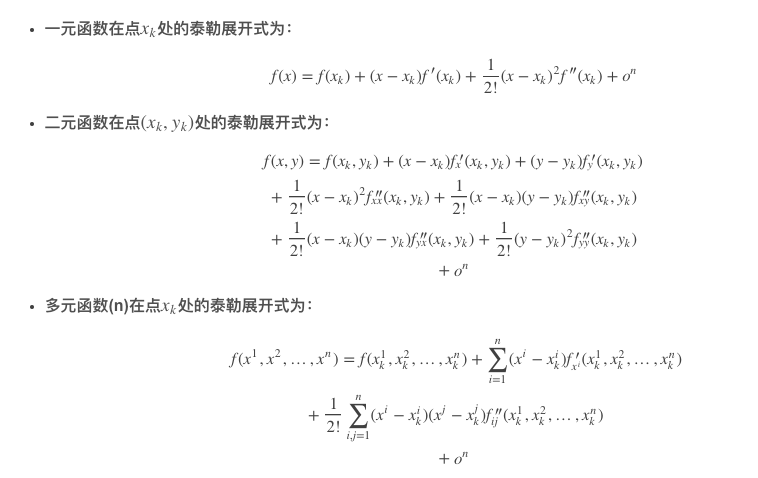
这里,我们就可以尝试下泰勒的一级展开

当然了,这个倒后面,我们做优化的时候,用到的牛顿法,也有关系了,不过今天我不说。
![]()
后面看到那个R没有,我们叫余项,这里也就是说,n不可能无限对吧,我选了一个N,那一定和实际的有差距,这里也就是只是个估算。当然情况下,是有n阶导数了,没有的话,后面都是0,n也不是无穷的。
那我们看个比较简单的情况吧,针对我说的线性方程或者是仿射方程。
我们取一阶导数 这里 x是n-vector z是n-vector
![]()
那这个估值,我们可以表示为
![]() 用梯度表示 更舒服一点。
用梯度表示 更舒服一点。
这里有个例题,可以带着看下
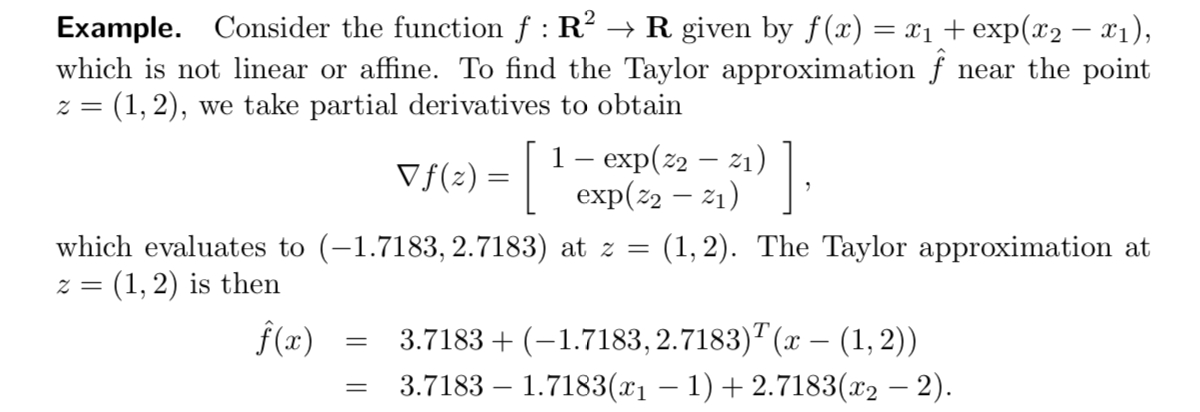
我们用不同的点带进去看下

其实发现,离的越近,当然误差越小。
再安利一本数学书,非常推荐,vmls, 配套的语言是julia,有兴趣的来这里下载
链接:https://pan.baidu.com/s/1g6xSR0XbN7kh-FHetFpzKw
提取码:gg36

