

信息安全系统设计基础第十四周学习总结——20135308
第九章 虚拟存储器
虚拟存储器的三个重要能力:
它将主存看成是一个存储在磁盘上的地址空间的高速缓存,在主存中只保存活动区域,并根据需要在磁盘和主存之间来回传送数据,通过这种方式,高效的使用了主存
它为每个进程提供了一致的地址空间,从而简化了存储器管理
它保护了每个进程的地址空间不被其他进程破坏
第一节 物理和虚拟寻址
1.物理地址

计算机系统的主存被组织成一个由M个连续的字节大小的单元组成的数组,每字节都有一个唯一的物理地址PA。
根据物理地址寻址的是物理寻址。
2.虚拟地址
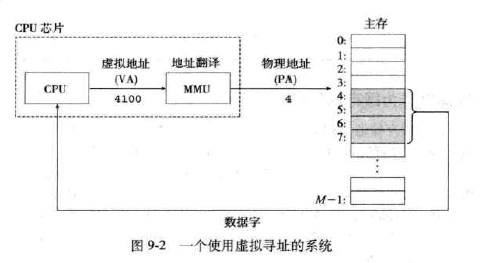
虚拟存储器被组织为一个由存放在磁盘上的N个连续的字节大小的单元组成的数组。
使用虚拟寻址时,CPU通过生成一个虚拟地址VA来访问主存,这个虚拟地址在被送到存储器之前先转换成适当的物理地址。
第二节 地址空间
1.地址空间
地址空间是一个非负整数地址的有序集合:{0,1,2,……}
2.线性地址空间
地址空间中的整数是连续的。
3.虚拟地址空间
CPU从一个有 N=2^n 个地址的地址空间中生成虚拟地址,这个地址空间成为称为虚拟地址空间。
4.地址空间的大小
由表示最大地址所需要的位数来描述。N=2^n:n位地址空间
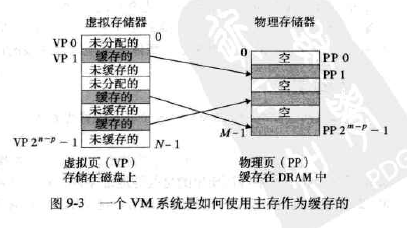
第三节 虚拟存储器作为缓存的工具
虚拟存储器——虚拟页VP,每个虚拟页大小为P=2^平字节。
物理存储器——物理页PP,也叫页帧,大小也为P字节。
任意时刻,虚拟页面的集合都被分为三个不相交的子集:
未分配的:VM系统还没分配/创建的页,不占用任何磁盘空间。
缓存的:当前缓存在物理存储器中的已分配页
未缓存的:没有缓存在物理存储器中的已分配页
1.DRAM缓存的组织结构
不命中处罚很大
是全相联的——任何虚拟页都可以放在任何的物理页中。
替换算法精密
总是使用写回而不是直写。
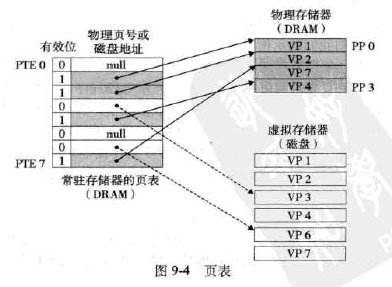
2.页表
页表是一个数据结构,存放在物理存储器中,将虚拟页映射到物理页。
页表就是一个页表条目PTE的数组,组成为:有效位+n位地址字段
1.如果设置了有效位:
地址字段表示DRAM中相应的物理页的起始位置,这个物理页中缓存了该虚拟页
2.如果没有设置有效位:
(1)空地址:
表示该虚拟页未被分配
(2)不是空地址:
这个地址指向该虚拟页在磁盘上的起始位置。
3.缺页
缺页:就是指DRAM缓存不命中。
缺页异常:会调用内核中的缺页异常处理程序,选择一个牺牲页。
页:虚拟存储器的习惯说法,就是块
交换=页面调度:磁盘和存储器之间传送页的活动
按需页面调度:直到发生不命中时才换入页面的策略,所有现代系统都使用这个。
4.虚拟存储器中的局部性
局部性原则保证了在任意时刻,程序将往往在一个较小的活动页面集合上工作,这个集合叫做工作集/常驻集。
所以只要程序有良好的时间局部性,虚拟存储器系统就能工作的相当好。
第四节 虚拟存储器作为存储器管理的工具
- 操作系统为每个进程提供了一个独立的页表,也就是一个独立的虚拟地址空间。
- 抖个虚拟页面可以映射到同一个共享物理页面上。
- 存储器映射:将一组连续的虚拟页映射到任意一个文件中的任意位置的表示法。
VM简化了链接和加载、代码和数据共享,以及应用程序的存储器分配。
第五节 虚拟存储器作为存储器保护的工具
这里需要知道PTE的三个许可位:
- SUP:表示进程是否必须运行在内核模式下才能访问该页
- READ:读权限
- WRITE:写权限
第六节 地址翻译
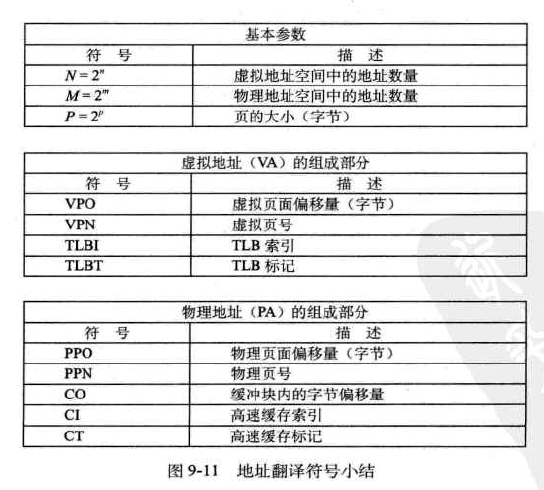
地址翻译就是一个N元素的虚拟地址空间VAS中的元素和一个M元素的物理地址空间PAS中元素之间的映射。
页面基址寄存器PTBR指向当前页表。
MMU利用VPN选择适当的PTE。
PPO=VPO。
一、结合高速缓存和虚拟存储器来看
首先,在既使用SRAM高速缓存又使用虚拟存储器的系统中,大多数系统选择物理寻址
主要思路是地址翻译发生在高速缓存之前
页表目录可以缓存,就像其他的数据字一样
二、利用TLB加速地址翻译
TLB:翻译后备缓冲器,是一个小的、虚拟存储的缓存,其中每一行都保存着一个由单个PTE组成的块

步骤:
- CPU产生一个虚拟地址
- MMU从TLB中取出相应的PTE
- MMU将这个虚拟地址翻译成一个物理地址,并且将它发送到高速缓存/主存
- 高速缓存/主存将所请求的数据字返回给CPU
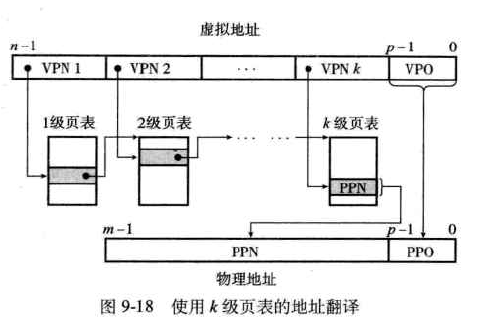
三、多级页表
多级页表——采用层次结构,用来压缩页表。
1.以两层页表层次结构为例,好处是:
如果一级页表中的一个PTE是空的,那么相应的二级页表就根本不会存在
只有一级页表才需要总是在主存中,虚拟存储器系统可以在需要时创建、页面调入或调出二级页表,只有最经常使用的二级页表才缓存在主存中。
2.多级页表的地址翻译:
四、端对端的地址翻译
这一部分看懂书上的例题。
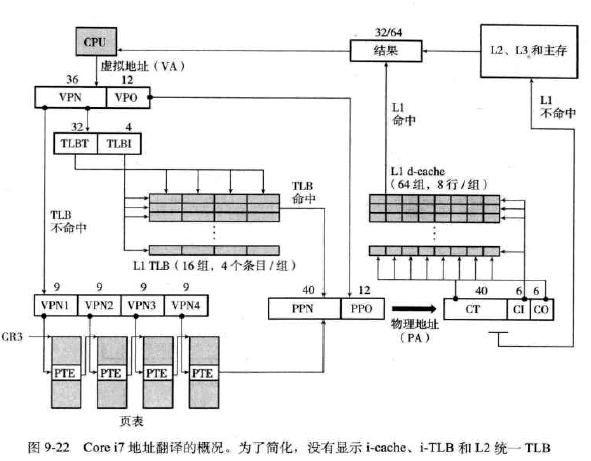
第七节 案例研究
一、Core i7地址翻译

二、Linux虚拟存储器系统
Linux为每个进程维持了一个单独的虚拟地址空间,如图:
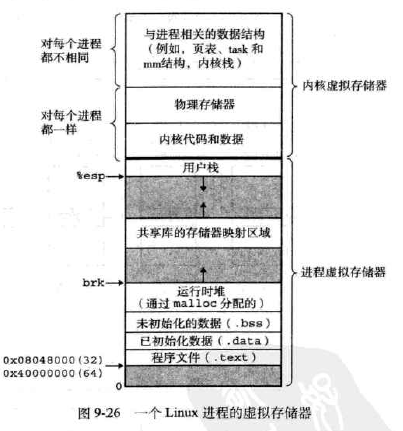
内核虚拟存储器包括:内核中的代码和数据结构。
一部分区域映射到所有进程共享的物理页面
另一部分包含每个进程都不相同的数据。
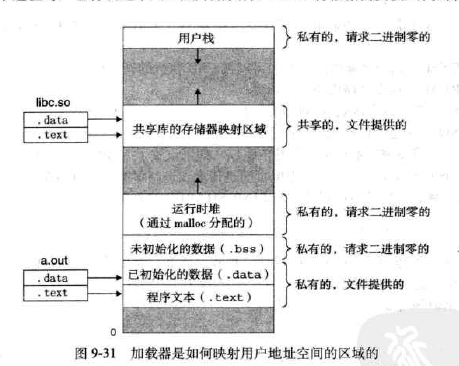
第八节 存储器映射
即指Linux通过将一个虚拟存储器区域与一个磁盘上的对象关联起来,以初始化这个虚拟存储器区域的内容的过程。
一、共享对象和私有对象
1.共享对象
共享对象对于所有把它映射到自己的虚拟存储器进程来说都是可见的,即使映射到多个共享区域,物理存储器中也只需要存放共享对象的一个拷贝。
2.私有对象
私有对象运用的技术:写时拷贝,在物理存储器中只保存有私有对象的一份拷贝
fork函数就是应用了写时拷贝技术,至于execve函数:
二、使用mmap函数的用户级存储器映射
1.创建新的虚拟存储器区域
2.删除虚拟存储器
第九节 动态存储器分配
1.堆:
是一个请求二进制0的区域,紧接在未初始化的bss区域后开始,并向上(更高的地址)生长。有一个变量brk指向堆的顶部
2.分配器的两种基本风格:
- 显示分配器-malloc和free
- 隐式分配器/垃圾收集器
一、malloc和free函数:
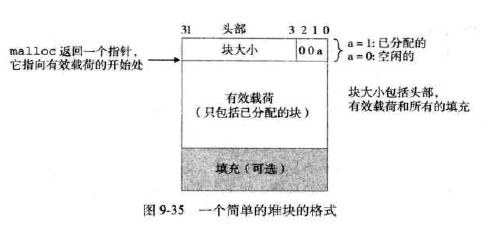
系统调用malloc函数,从堆中分配块:
#include <stdlib.h> void *malloc(size_t size); 成功返回指针,指向大小至少为size字节的存储器块,失败返回NULL
系统调用free函数来释放已分配的堆块:
#include <stdlib.h> void free(void *ptr); 无返回值
ptr参数必须指向一个从malloc、calloc或者reallov获得的已分配块的起始位置。
二、分配器的要求和目标:
1.要求
处理任意请求序列
立即响应请求
只使用堆
对齐块
不修改已分配的块
2.目标:
最大化吞吐率(吞吐率:每个单位时间里完成的请求数)
最大化存储器利用率——峰值利用率最大化
三、碎片
虽然有未使用的存储器,但是不能用来满足分配请求时,发生这种现象。
1.内部碎片
发生在一个已分配块比有效载荷大的时候,易于量化。
2.外部碎片
发生在当空闲存储器合计起来足够满足一个分配请求,但是没有一个单独的空间块足以处理这个请求时发生,难以量化。
四、隐式空闲链表
堆块的格式:
由一个字的头部,有效荷载,和可能的额外填充组成。
将堆组织成一个连续的已分配块和空闲块的序列:

空闲块通过头部中的大小字段隐含地连接着,分配器可以通过遍历堆中所有的块,从而间接地遍历整个空闲块的集合。
系统对齐要求和分配器对块格式的选择会对分配器上的最小块大小有强制的要求。
五、放置已分配的块——放置策略
1.首次适配
从头开始搜索空闲链表,选择第一个合适的空闲块
2.下一次适配
从上一次搜索的结束位置开始搜索
3.最佳适配
检索每个空闲块,选择适合所需请求大小的最小空闲块
六、申请额外的堆存储器
用到sbrk函数:
#include <unistd.h> vid *sbrk(intptr_t incr); 成功则返回旧的brk指针,出错为-1
通过将内核的brk指针增加incr来扩展和收缩堆。
七、合并空闲块
合并是针对于假碎片问题的,任何实际的分配器都必须合并相邻的空闲块。
有两种策略:
- 立即合并
- 推迟合并
八、带边界的合并
这个合并的意思是,因为头部的存在,所以向后合并是简单的,但是向前合并是不方便的,所以���在块的最后加一个脚部,作为头部的副本,就方便了合并,具体四种情况如下:
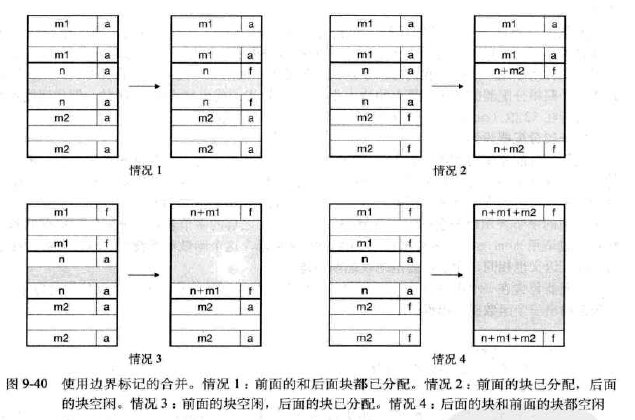
空闲块总是需要脚部的。
九、实现简单的分配器
序言块和结尾块:序言块是初始化时创建的,而且永不释放;结尾块是一个特殊的块,总是以它为结束。
有一个技巧,就是将重复使用的,操作复杂又有重复性的,这些可以定义成宏,方便使用也方便修改。
需要注意强制类型转换,尤其是带指针的,非常复杂。
因为规定了字节对齐方式为双字,就代表块的大小是双字的整数倍,不是的舍入到是。
十、显式空闲链表
1.区别
(1)分配时间
隐式的,分配时间是块总数的线性时间
但是显式的,是空闲块数量的线性时间。
(2)链表形式
隐式——隐式空闲链表
显式——双向链表,有前驱和后继,比头部脚部好使。
2.排序策略:
后进先出
按照地址顺序维护
十一、分离的空闲链表
分离存储,是一种流行的减少分配时间的方法。一般思路是将所有可能的块大小分成一些等价类/大小类。
分配器维护着一个空闲链表数组,每个大小类一个空闲链表,按照大小的升序排列。
有两种基本方法:
1.简单分离存储
每个大小类的空闲链表包含大小相等的块,每个块的大小就是这个大小类中最大元素的大小。
(1)操作
如果链表非空:分配其中第一块的全部
如果链表为空:分配器向操作系统请求一个固定大小的额外存储器片,将这个片分成大小相等的块,并且连接起来成为新的空闲链表。
(2)优缺点
优点:时间快,开销小
缺点:容易造成内部、外部碎片
2.分离适配
每个空闲链表是和一个大小类相关联的,并且被组织成某种类型的显示或隐式链表,每个链表包含潜在的大小不同的块,这些块的大小是大小类的成员。
这种方法快速并且对存储器使用很有效率。
3.伙伴系统——分离适配的特例
其中每个大小类都是2的幂
这样,给定地址和块的大小,很容易计算出它的伙伴的地址,一个块的地址和它的伙伴的地址只有一位不同。
优点:快速检索,快速合并。
第十节 垃圾收集
垃圾收集器是一种动态存储分配器,它自动释放程序不再需要的已分配块,这些块被称为垃圾,自动回收堆存储的过程叫做垃圾收集。
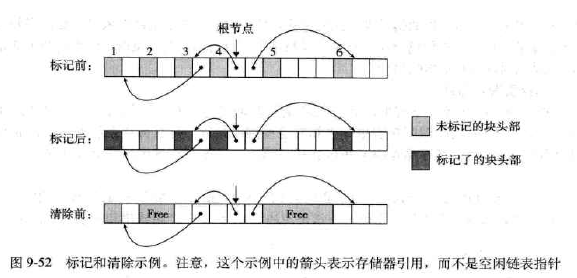
1.垃圾收集器将存储器视作一张有向可达图,只有当存在一条从任意根节点出发并到达p的有向路径时,才说节点p是可达的,而不可达点就是垃圾。

2.Mark&Sweep垃圾收集器
有两个阶段:
- 标记:标记出根节点的所有可达的和已分配的后继
- 清楚:释放每个未被标记的已分配块。
相关函数:
ptr定义为typedef void *ptr
ptr isPtr(ptr p):如果p指向一个已分配块中的某个字,那么就返回一个指向这个块的起始位置的指针b,否则返回NULL
int blockMarked(ptr b):如果已经标记了块b,那么就返回true
int blockAllocated(ptr b):如果块b是已分配的,那么久返回ture
void markBlock(ptr b):标记块b
int length(ptr b):返回块b的以字为单位的长度,不包括头部
void unmarkBlock(ptr b):将块b的状态由已标记的改为未标记的
ptr nextBlock(ptr b):返回堆中块b的后继
3.C保守的Mark&Sweep——平衡二叉树
因为C语言不会用类型标记来标记存储器位置。
第十一节 C程序中常见的与存储器有关的错误
1.间接引用坏指针
常见错误:
——scanf错误
2.读未初始化的存储器
常见错误:
——假设堆存储器被初始化为0
3.允许栈缓冲区溢出
常见错误:
——缓冲区溢出错误
4.假设指针和它们指向的对象是相同大小的
在远处起作用action at distance
5.造成错位错误
6.引用指针,而不是它所指向的对象
7.误解指针运算
8.引用不存在的变量
9.引用空堆块中的数据
10.引起存储器泄露
学习总结
本周学习了存储器的相关知识,对于分配器的相关内容学习得不是很透彻,希望老师上课可以着重讲解一下。
参考资料
教材:《深入理解计算机系统》

