

基于 FPGA 的图像边缘检测
本文主要内容是实现图像的边缘检测功能
目录
- mif文件的制作
- 调用 ip 核生成rom以及在 questasim 仿真注意问题
- 灰度处理
- 均值滤波:重点是3*3 像素阵列的生成
- sobel边缘检测
- 图片的显示
- 结果展示
mif文件的制作
受资源限制,将图片像素定为 160 * 120,将图片数据制成 mif 文件,对 rom ip 核进行初始化。mif文件的制作方法网上有好多办法,因此就不再叙述了,重点说mif文件的格式。
1、mif文件的格式为:
1 WIDTH=16 ; //数据位宽 2 DEPTH=19200 ; // rom 深度即图片像素点的个数 3 ADDRESS_RADIX=UNS ; //地址数据格式 4 DATA_RADIX=BIN ; //数据格式 5 CONTENT 6 BEGIN 7 0:1010110011010000 ; // 地址 :数据 ;注意格式要和上面定义的保持统一 8 1:1010110011010000 ; 9 2:1010010010110000 ; 10 ...... 11 19198:1110011011111001 ; 12 19199:1110011011011000 ; 13 END;
调用ip 核生成 rom 以及在 questasim 仿真注意问题
这部分内容已经在上篇博文中详细描述过,详情请见http://www.cnblogs.com/aslmer/p/5780107.html
灰度处理
- 浮点算法:Gray=0.299R+0.587G+0.114B
- 平均值法:Gray=(R+G+B)/3;
- 仅取单色(如绿色):Gray=G;





--------------------------------------------------------------------------------------------------------------------
此次我采用是浮点算法来实现灰度图的,我的图片数据是RGB565 格式 ,
难点: 如何进行浮点运算。
思路:先将数据放大,然后再缩小。
always @(posedge clk or negedge rst_n)begin if(rst_n==1'b0)begin red_r1 <= 0 ; green_r1 <= 0 ; blue_r1 <= 0 ; end else begin red_r1 <= red * 77 ; //放大后的值 green_r1 <= green * 150; blue_r1 <= blue * 29 ; end end always @(posedge clk or negedge rst_n)begin if(rst_n==1'b0)begin Gray <= 0; // 三个数之和 end else begin Gray <= red_r1 + green_r1 + blue_r1; end end always @(posedge clk or negedge rst_n)begin if(rst_n==1'b0)begin post_data_in <= 0; //输出的灰度数据 end else begin post_data_in <= { Gray[13:9], Gray[13:8], Gray[13:9] };//将Gray值赋值给RGB三个通道 end end
均值滤波
均值滤波的原理
http://blog.csdn.net/hhygcy/article/details/4325304 (此处引用 hhygcy 的文章)
难点:如何生成 3*3 的像素阵列。
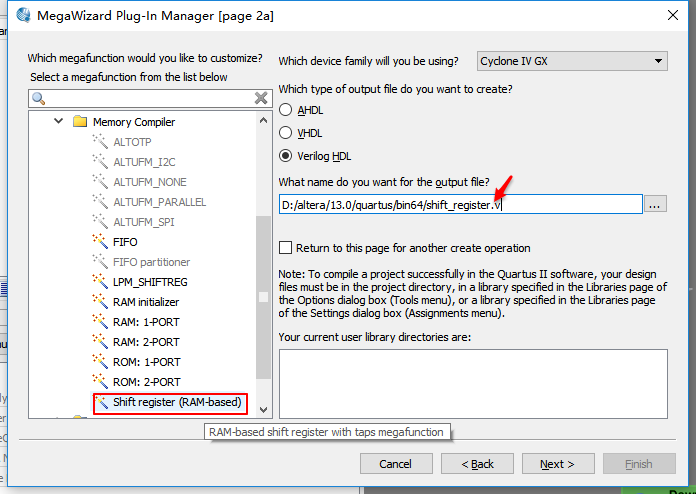
我们可以利用 ip 核生成移位寄存器 ,方法与 ip 核 生成 rom 一样,详情见目录 2 因此不再赘述 。
仿真波形如下 row_1 , row_2 , row_3 是指图像的第一、二、三行的数据,Per_href 是行有效信号(受VGA时序的启发,从 rom 中读取数据时设计了行有效和场有效的控制信号,事半功倍,有了利于仿真查错和数据的控制)。从 3 开始就出现了3*3 的像素阵列,这时候就可以求取周围 8 个像素点的平均值,进行均值滤波。

下面这个图是我自己画的 FPGA 如何将矩阵数据处理成并行的像素点,可以结合下面的代码好好理解,这也是精华所在。
正方形红框框起来的是第一个完整的 3*3 矩阵,长方形红框框起来的是并行的像素点,在此基础上就可以求得平均值,进行均值滤波。
从下图也能看到 3*3 矩阵从左往右滑动。
第一个3*3 阵列。
0 1 2 -- > p11 p12 p13
3 4 5 -- > p21 p22 p23
6 7 8 -- > p31 p32 p33

核心代码如下:
reg [5:0]p_11,p_12,p_13; // 3 * 3 卷积核中的像素点 reg [5:0]p_21,p_22,p_23; reg [5:0]p_31,p_32,p_33; reg [8:0]mean_value_add1,mean_value_add2,mean_value_add3;//每一行之和 always @(posedge clk or negedge rst_n)begin if(rst_n==1'b0)begin {p_11,p_12,p_13} <= {5'b0,5'b0,5'b0} ; {p_21,p_22,p_23} <= {15'b0,15'b0,15'b0}; {p_31,p_32,p_33} <= {15'b0,15'b0,15'b0}; end else begin if(per_href_ff0==1&&flag_do==1)begin {p_11,p_12,p_13}<={p_12,p_13,row_1}; {p_21,p_22,p_23}<={p_22,p_23,row_2}; {p_31,p_32,p_33}<={p_32,p_33,row_3}; end else begin {p_11,p_12,p_13}<={5'b0,5'b0,5'b0}; {p_21,p_22,p_23}<={5'b0,5'b0,5'b0} {p_31,p_32,p_33}<={5'b0,5'b0,5'b0} end end end always @(posedge clk or negedge rst_n)begin if(rst_n==1'b0)begin mean_value_add1<=0; mean_value_add2<=0; mean_value_add3<=0; end else if(per_href_ff1)begin mean_value_add1<=p_11+p_12+p_13; mean_value_add2<=p_21+ 0 +p_23; mean_value_add3<=p_31+p_32+p_33; end end wire [8:0]mean_value;//8位数之和 wire [5:0]fin_y_data; //平均数,除以8,相当于左移三位。 assign mean_value=mean_value_add1+mean_value_add2+mean_value_add3; assign fin_y_data=mean_value[8:3];
sobel 边缘检测
边缘检测的原理
该算子包含两组 3x3 的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。A代表原始图像的 3*3 像素阵列,Gx及Gy分别代表经横向及纵向边缘检测的图像,其公式如下:
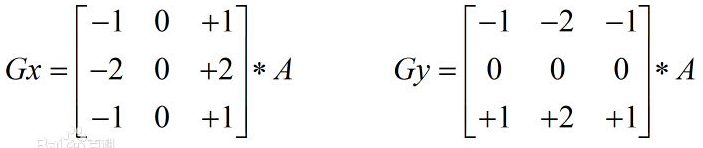
图像的每一个像素的横向及纵向梯度近似值可用以下的公式结合,来计算梯度的大小。
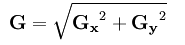
如果梯度G大于某一阀值则认为该点(x,y)为边缘点。
-------------------------------------------------------------------------------------------------------------------
用的是 边缘检测算法。
难点:(1)掌握了 3*3 像素阵列,Gx 与 Gy 就很好计算了 (注意问题:为了避免计算过程中出现负值,所以将正负值分开单独计算,具体见代码)
(2)G的计算需要开平方,如何进行开平方运算
Quartus 提供了开平方 ip 核,因此我们直接调用就好了 。

代码:
reg [8:0] p_x_data ,p_y_data ; // x 和 y 的正值之和 reg [8:0] n_x_data ,n_y_data ; // x 和 y 的负值之和 reg [8:0] gx_data ,gy_data ; //最终结果 always @(posedge clk or negedge rst_n)begin if(rst_n==1'b0)begin p_x_data <=0; n_x_data <=0; gx_data <=0; end else if(per_href_ff1==1) begin p_x_data <= p_13 + (p_23<<1) + p_33 ; n_x_data <= p_11 + (p_12<<1 )+ p_13 ; gx_data <= (p_x_data >=n_x_data)? p_x_data - n_x_data : n_x_data - p_x_data ; end else begin p_x_data<=0; n_x_data<=0; gx_data <=0; end end always @(posedge clk or negedge rst_n)begin if(rst_n==1'b0)begin p_y_data <=0; n_y_data <=0; gy_data <=0; end else if(per_href_ff1==1) begin p_y_data <= p_11 + (p_12<<1) + p_13 ; n_y_data <= p_31 + (p_32<<1) + p_33 ; gy_data <= (p_y_data >=n_y_data)? p_y_data - n_y_data : n_y_data - p_y_data ; end else begin p_y_data <=0; n_y_data <=0; gy_data <=0; end end //求平方和,调用ip核开平方 reg [16:0] gxy; // Gx 与 Gy 的平方和 always @(posedge clk or negedge rst_n)begin if(rst_n==1'b0)begin gxy<=0; end else begin gxy<= gy_data* gy_data + gx_data* gx_data ; end end wire [8:0] squart_out ; altsquart u1_altsquart ( //例化开平方的ip核 .radical (gxy), .q (squart_out), //输出的结果 .remainder() ); //与阈值进行比较 reg [15:0] post_y_data_r; always @(posedge clk or negedge rst_n)begin if(rst_n==1'b0)begin post_y_data_r<=16'h00; end else if(squart_out>=threshold) post_y_data_r<=16'h00 ; else post_y_data_r<=16'hffff ; end
图片的显示
本来是想用 VGA 来显示图片的,由于条件的限制没能实现,最终只能将处理完的数据输出保存在 .txt 文件中,然后借助好友写的网页进行显示。
难点:(1) 如何将数据流输出保存到 .txt 文件中。
(2) 网页的使用及注意事项
在testbench里加入下面所示代码即可将图片数据保存到 .txt 文本
代码如下:
integer w_file; initial w_file = $fopen("data_out_3.txt"); //保存数据的文件名 always @(posedge clk or negedge rst_n) begin if(flag_write==1&&post_href==1)//根据自己的需求定义 $fdisplay(w_file,"%b",post_y_data); end
------------------------------------------------------------------------------------------------
网页的界面如下,将参数设置好以后就可以显示图片。
下载链接 https://files.cnblogs.com/files/aslmer/aggregrate.zip
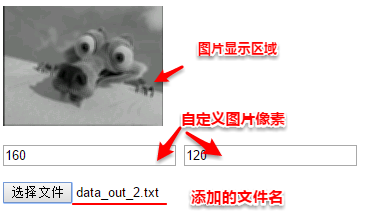
注意:由于此网站是量身定做的,所以只能显示数据格式为RGB565的16位二进制的数才能正确显示,注意不能有分号,正确格式示例如下,必须严格遵守
结果展示
|
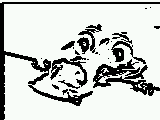
1 原图 |
2 灰度图 |
3 均值滤波 |
|
4 边缘检测 阈值为5 |
5 阈值为 10 |
6 阈值为 16 |





小结:均值滤波处理后的图片有明显的黑边,产生这一现象的原因就是生成 3*3 像素矩阵和取像素值时数据有损失造成的,但是这也是可以优化的,后续我会继续努力不断完善。本次只是简单对一幅图像进行边缘检测,我的后续目标是实现图片的实时处理,这又需要学习很多东西了,SDRAM、摄像头驱动等等等,越学习越发现自己知道的实在是太少了,永远在路上,学无止境。希望我的分享能够帮助一些和我一样热爱 FPGA 图像处理的朋友。
每天进步一点点,开心就好
aslmer
