


[转载+原创]Emgu CV on C# (六) —— Emgu CV on Canny边缘检测
Canny边缘检测也是一种边缘检测方法,本文介绍了Canny边缘检测的函数及其使用方法,并利用emgucv方法将轮廓检测解算的结果与原文进行比较。
图像的边缘检测的原理是检测出图像中所有灰度值变化较大的点,而且这些点连接起来就构成了若干线条,这些线条就可以称为图像的边缘。Canny边缘检测算子是John F. Canny于 1986 年开发出来的一个多级边缘检测算法。
Canny 边缘检测的数学原理和算法实现这里就不再了,有兴趣的读者可以查阅专业书籍。
一、概述(若果不想看,可以略过。转自:《Canny边缘检测算法原理及其VC实现详解》、“百度百科”和《我的OpenCV学习笔记(19):检测轮廓,直线,圆以及直线拟合》)
Canny边缘检测算子是John F. Canny于 1986 年开发出来的一个多级边缘检测算法。更为重要的是 Canny 创立了边缘检测计算理论(Computational theory of edge detection)解释这项技术如何工作。
检测轮廓时我们使用canny边沿检测算法,这个算法其实也是基于梯度的。但是,与传统的梯度算法求边沿不同的是:
•对图像进行扫描,当遇到一个非零灰度的像素p(x,y)时,跟踪以p(x,y)为开始点的轮廓线,直到轮廓线的终点q(x,y)。
•考察图像1中与图像2中q(x,y)点位置对应的点s(x,y)的8邻近区域。如果在s(x,y)点的8邻近区域中有非零像素s(x,y)存在,则将其包括到图像2中,作为r(x,y)点。从r(x,y)开始,重复第一步,直到我们在图像1和图像2中都无法继续为止。
•当完成对包含p(x,y)的轮廓线的连结之后,将这条轮廓线标记为已经访问。回到第一步,寻找下一条轮廓线。重复第一步、第二步、第三步,直到图像2中找不到新轮廓线为止。
•至此,完成canny算子的边缘检测。
在OpenCV中使用Canny函数来检测边沿。第一个参数是待检测的图像,第二个参数是检测结果;后两个参数是那两个门限,通常高低阈值比在 2:1 到3:1之间。
参数调整:Canny 算法包含许多可以调整的参数,它们将影响到算法的计算的时间与实效。
不足:Canny 算法适用于不同的场合。它的参数允许根据不同实现的特定要求进行调整以识别不同的边缘特性。对于PC上的实时图像处理来说可能慢得无法使用,尤其是在使用大的高斯滤波器的情况下。但是,我们讨论计算能力的时候,也要考虑到随着处理器速度不断提升,有望在未来几年使得这不再成为一个问题。
二、程序实现
1、关键函数
public static void cvCanny( IntPtr image, IntPtr edges, double threshold1, double threshold2, int apertureSize )
第一个参数image,Input image
表示输入图像,必须为单通道灰度图
第二个参数edges,Image to store the edges found by the function
表示输出的边缘图像,为单通道黑白图
第三个参数threshold1,The first threshold
第四个参数threshold2,The second threshold.
第三个参数和第四个参数表示阈值,这二个阈值中当中的小阈值用来控制边缘连接,大的阈值用来控制强边缘的初始分割,即如果一个像素的梯度大与上限值,则被认为是边缘像素,如果小于下限阈值,则被抛弃。如果该点的梯度在两者之间则当这个点与高于上限值的像素点连接时我们才保留,否则删除。
第五个参数aperture,Aperture parameter for Sobel operator
表示Sobel 算子大小,默认为3即表示一个3*3的矩阵。Sobel 算子与高斯拉普拉斯算子都是常用的边缘算子,详细的数学原理可以查阅专业书籍。
2、编程实现
//canny算子边缘检测 IntPtr Cannyimg = CvInvoke.cvCreateImage(CvInvoke.cvGetSize(Histimg), Emgu.CV.CvEnum.IPL_DEPTH.IPL_DEPTH_8U, 1); CvInvoke.cvCanny(Histimg, Cannyimg, trackBar1.Value, trackBar1.Value * 3, 3); MIplImage cannymi = (MIplImage)Marshal.PtrToStructure(Cannyimg, typeof(MIplImage)); Image<Gray, Byte> cannyimage = new Image<Gray, Byte>(cannymi.width, cannymi.height, cannymi.widthStep, cannymi.imageData);
pictureBox5.Image = cannyimage.ToBitmap();
三、结果分析
调整阈值与原文《【OpenCV入门指南】第三篇Canny边缘检测》使用Opencv的方法进行比较结果。
原文的图片和处理之后的图片,阈值设定为100.


本文利用emgucv方法,按照阈值为100解算获得的结果。
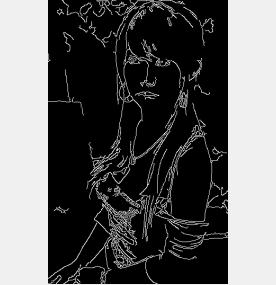
从两张图比对看,利用emgucv方法获取的细节更多一些,需要根据项目需要和自身设定场合进行适应性调整。
